Google DeepMind-yň hünärmenleri stolüsti tennisini oýnamaga ukyply we höwesjeňleri ýeňip bilýän AI (emeli aň) robotyny işläp düzdüler.
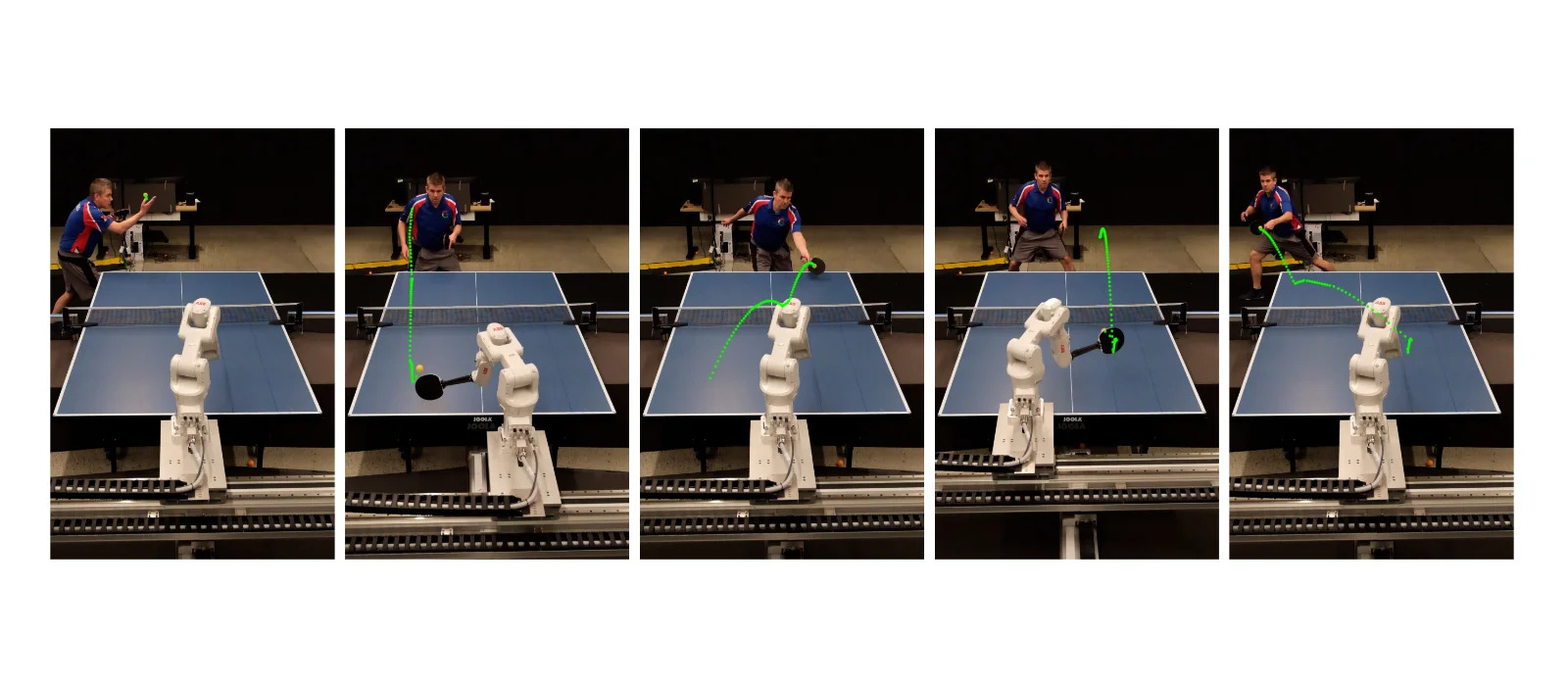
Taslamanyň esasy hökmünde, raketka we stoluň üstündäki topy yzarlaýan ýokary tizlikli kameralar bilen enjamlaşdyrylan ABB IRB 1100 manipulýatory çykyş edýär. Şeýle hem ulgam garşydaşyň hereketlerini öňünden seljermek tehnologiýasyny öz içine alýar.
AI roboty oýny seljermek arkaly öz strategiýasyny yzygiderli uýgunlaşdyrýar. Ulgam iki režimde işleýär: esasy – ýönekeý hereketleri öwrenýär we ýokary – AI modelleri oýnuň usullaryny öwrenýärler. Robot hakyky topuň 17,5 müň traýektoriýasynda tälim aldy.
Synag oýunlarynda, robot 29 oýundan 13-sinde ýeňiş gazandy. Üstünliklerine garamazdan, ulgam ökde tennisçiler bilen bäsleşmäge entek taýyn däldir, sebäbi robot has çalt hereketlere jogap bermäge ýetişmeýär. Şeýle-de bolsa, hünämenler robotyň has kyn zarbalary ýeňip geçmek we ökde oýunçylara garşy çykyş etmek üçin kämilleşdirilip bilinjekdigini nygtaýarlar. Mundan başga-da, tehnologiýa çalt jogaby we uýgunlaşmagy talap edýän beýleki robot meselelerinde hem ulanylyp bilner.