Hytaýyň Ylymlar akademiýasynyň Şenýan awtomatlaşdyryş institutynyň alymlary daşky gurşawyň şertlerine görä ýüzüş usulyny üýtgedip bilýän ýumşak robot balygy döretdiler. Bu barada «IEEE Transactions on Robotics» ylmy žurnalynda çap edildi.
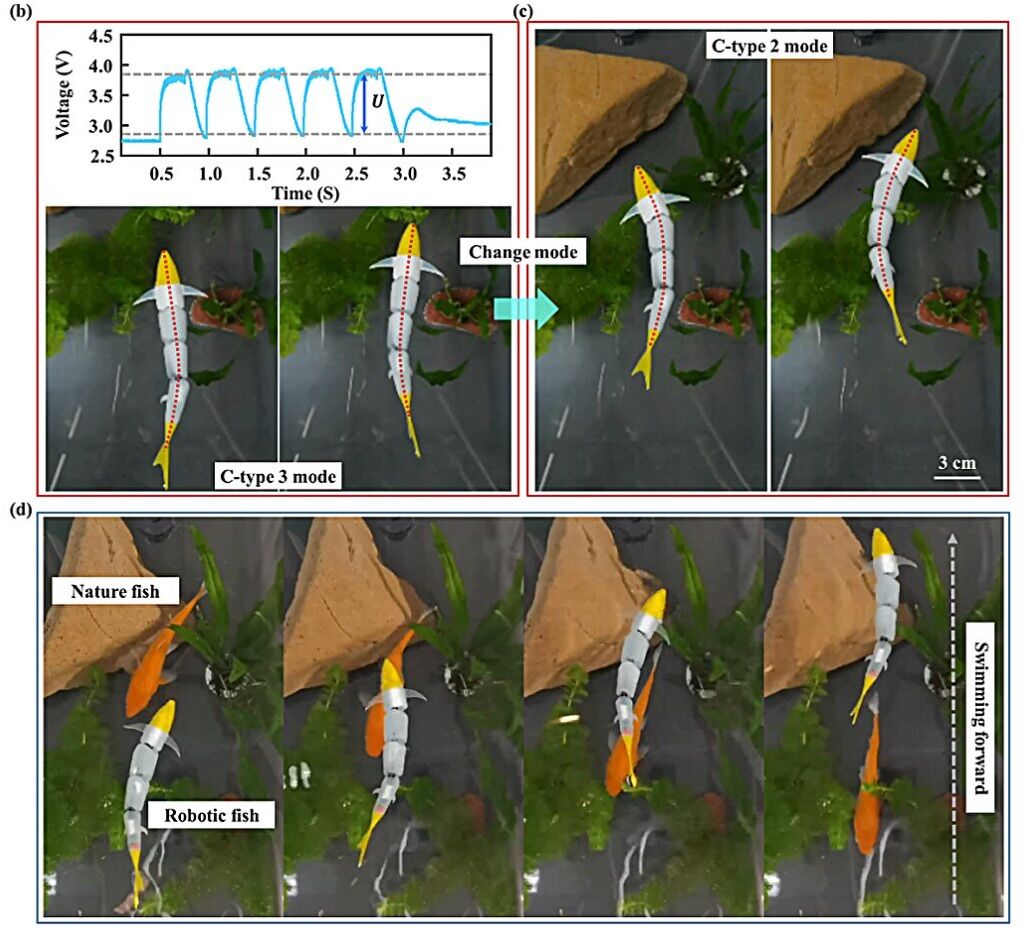
Robotyň esasy aýratynlygy – hereket, duýujylyk we dolandyryş ulgamlarynyň bir enjamda jemlenmegidir. Ol dört dürli usulda ýüzüp bilýär, bu bolsa ony bar bolan meňzeş enjamlardan has-da tapawutlandyrýar.
Inženerler skumbriýa balygynyň bedeniniň gurluşyny 3D çap tehnologiýasy arkaly nusgaladylar. Robotyň çeýe karkasy ýumşak hereketlendiriji bilen birleşdirildi. Bu hereketlendiriji üç esasy gatlakdan ybarat: gysylýan ýaýlar, dielektrikli elastomer membranalar we çeýe elektrodlar.
Robot daşky gurşawdaky üýtgeşmeleri duýar ýaly, alymlar ýokary takyklykdaky çeýe datçikleri ulandylar. Bu datçikler robota suwdaky ýerini we daş-töweregindäki şertleri kesgitlemäge mümkinçilik berýär. Şonuň netijesinde, robot iň amatly ýüzüş usulyna awtomatiki ýagdaýda geçip bilýär.
Robotyň hereketini dolandyrmak üçin, inženerler biologiki myşsa bloklarynyň iş tertibini utgaşykly bolar ýaly edip sazladylar. Munuň netijesinde, robot hakyky balyklaryň ýüzüşini gaýtalap, dürli şertlere uýgunlaşyp bilýär.
Bu tehnologiýa suwasty robot tehnikasynda täze mümkinçilikleriň öňüni açýar. Ol deňiz ekosistemalaryny öwrenmekde, gözleg-halas ediş işlerinde we beýleki ugurlarda ulanylyp bilner. Janly-jandarlaryň hereketlerini gaýtalaýan robotlaryň döredilmegi, suwasty enjamlaryň has-da kämilleşdirilmeginde birnäçe mümkinçilikleriň öňüni açýar.