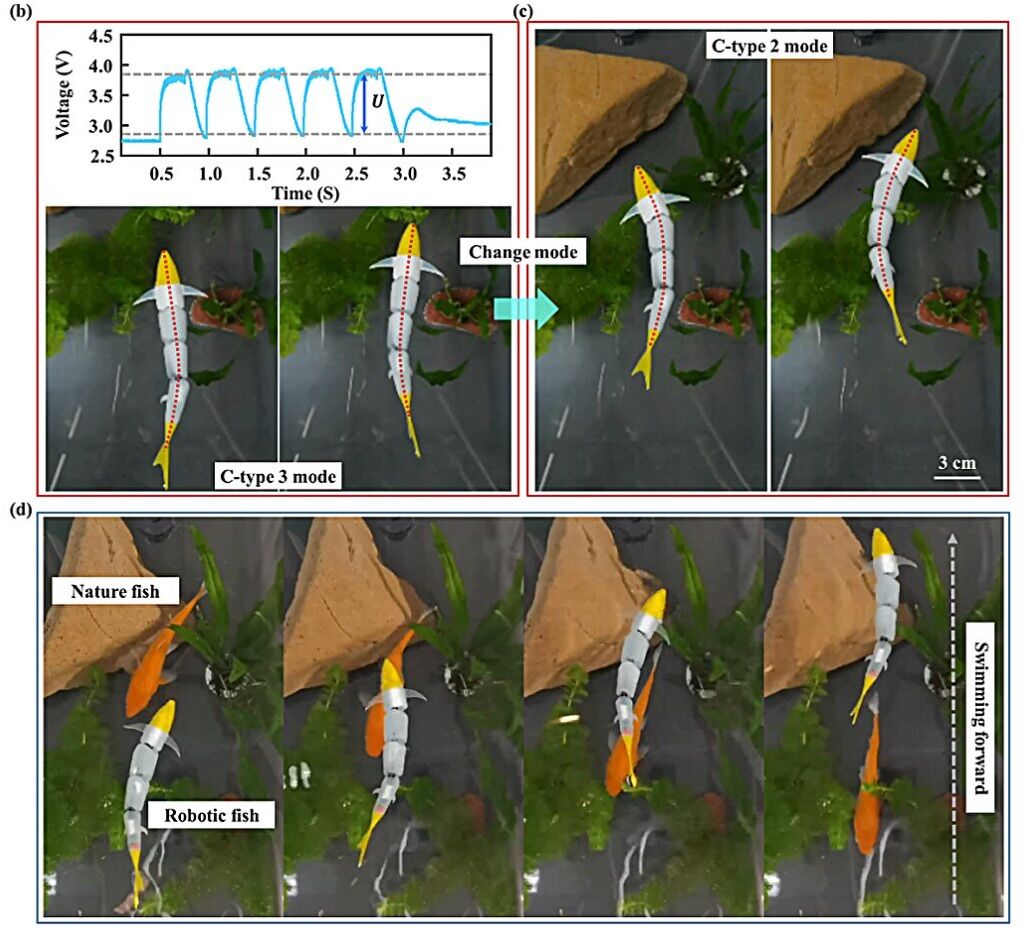
Группа ученых из Шэньянского института автоматизации Китайской академии наук создала мягкого робота в форме рыбы. Он адаптируется к условиям окружающей среды и сочетает в себе инновационные технологии, которые позволяют менять стиль плавания.
Робот выполнен по бионическому принципу и повторяет строение скумбрии. Его каркас изготовлен с помощью 3D-печати, а мягкий привод включает три слоя: сжимаемые пружины, диэлектрические эластомерные мембраны и гибкие электроды.
Для ориентации в воде применяются гибкие датчики деформации, которые фиксируют положение робота и изменения в среде. Это позволяет устройству выбирать оптимальный стиль передвижения. Синхронное управление бионическими мышцами помогает ему адаптироваться к разным условиям.
Разработка может использоваться для исследования морских экосистем, поисково-спасательных операций и других подводных задач. Инженеры считают, что такие адаптивные устройства откроют новые возможности в подводной робототехнике.