
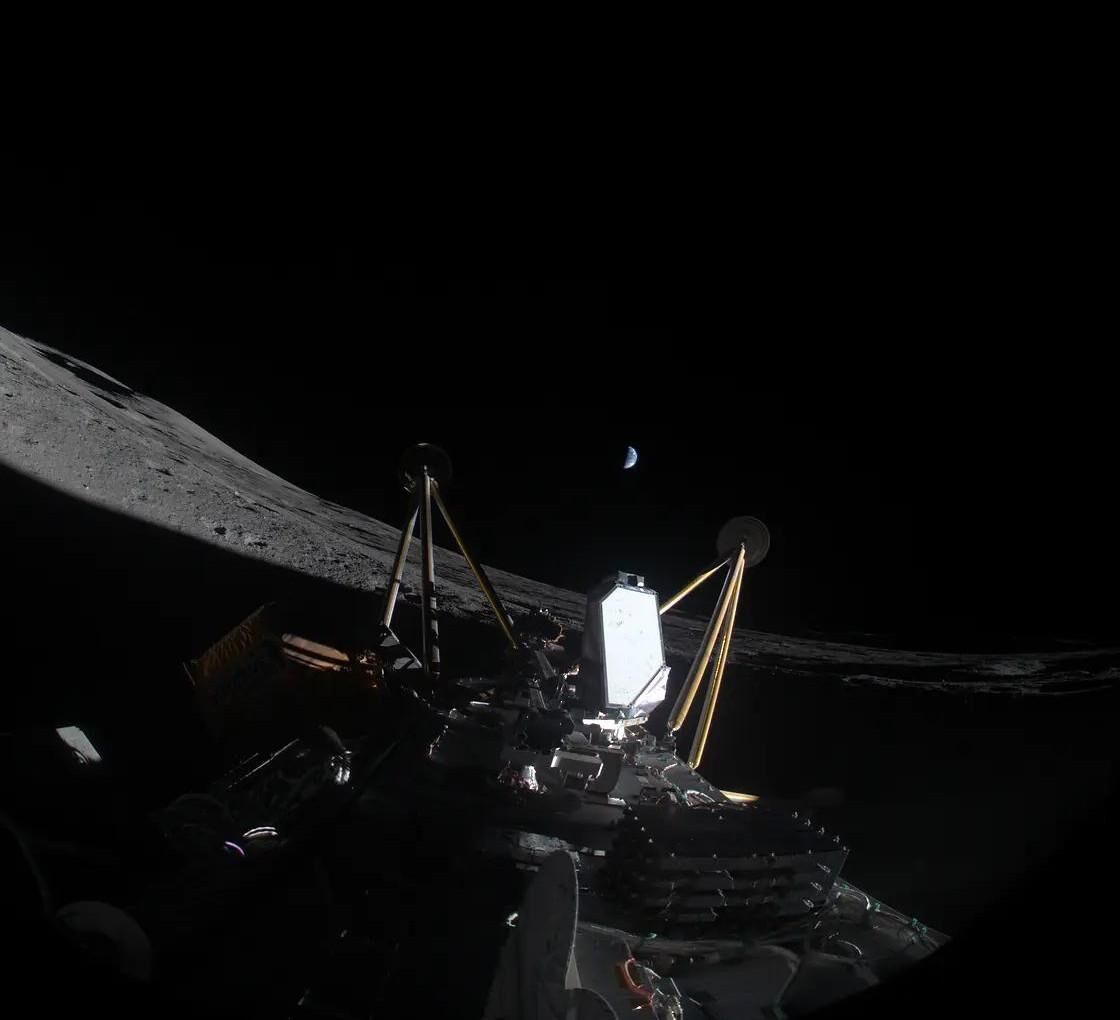
Лунный модуль Athena («Афина») американской компании Intuitive Machines потерпел крушение при посадке на Луну 6 марта 2025 года из-за сочетания нескольких технических проблем. Генеральный директор компании Стив Альтемус раскрыл причины неудачи.

По его словам, первой проблемой стали сбои в работе лазерного высотомера, передававшего искажённые сигналы. Второй причиной стало недостаточное освещение в районе Южного полюса Луны — это мешало системе посадки корректно определять рельеф. Третьим фактором стала ошибка в оптической навигации: использованные снимки NASA Lunar Reconnaissance Orbiter, сделанные с высоты 100 км, отличались от реального изображения поверхности на малой высоте.
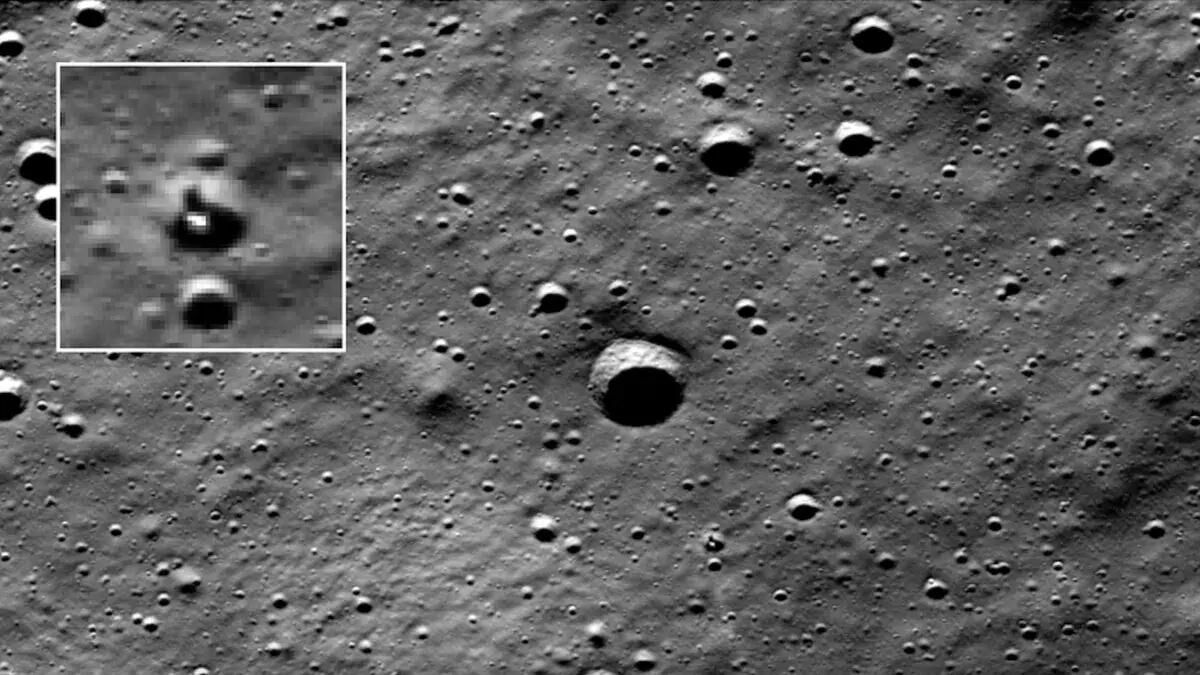
Модуль отклонился от расчетной точки на 250 метров и упал на бок в затенённый кратер. Солнечные панели не работали, аккумуляторы разрядились, миссия была завершена.
Athena — не первый лунный модуль Intuitive Machines. До него компания запустила к спутнику аппарат Odysseus, также созданный на базе платформы Nova-C, который запустили в феврале 2024 года в рамках миссии IM-1. Тогда жесткая посадка с последующим падением на бок на склоне помешала модулю выполнить значительную часть своей программы. Тем не менее, инженеры компании сделали выводы, провели работу над ошибками и дали модулю имя в честь древнегреческой богини мудрости Афины. Однако этого оказалось недостаточно: прилунение Athena прошло по схожему сценарию.
Миссия IM-2 предполагала 10-дневную научную работу. Модуль была оснащена буровой установкой TRIDENT (The Regolith and Ice Drill for Exploring New Terrain — «Ледово-реголитный бур для исследования новой поверхности»), а также масс-спектрометром MSolo. С их помощью модуль должен был собрать образцы грунта с разной глубины и исследовать их на предмет содержания водяного льда. Также на борту находились четырехколесный лунный ровер MAPP (Mobile Autonomous Prospecting Platform — «Мобильная автономная разведывательная платформа») компании Lunar Outpost, которому предстояло обследовать окрестности места посадки. Во время своего небольшого путешествия луноход должен был сделать снимки и картографировать поверхность Луны, а также собрать и исследовать образцы грунта. По самому роверу MAPP тем временем должен был ползать робот AstroAnt, разработанный в Массачусетским технологическим институтом (MIT). Этому «питомцу» размером со спичечный коробок предстояло проводить бесконтактные измерения температуры на верхней поверхности MAPP.
Кроме того, Athena доставила на Луну крохотный 500-граммовый ровер Yaoki японской компании Dymon и прыжковый модуль Micro Nova Hopper. Последний должен был совершить несколько перелетов и обследовать расположенный поблизости кратер глубиной 20 метров. На его постоянно затененном дне могут находиться запасы водяного льда, необходимого для получения на Луне собственно воды, а также кислорода и водорода в случае создания на спутнике временной или постоянной базы.
Связь между аппаратами должна была обеспечиваться системой LSCS (Lunar Surface Communication System — «Система связи на лунной поверхности») от Nokia, основанной на стандарте сотовой связи 4G вместо обычной радиочастоты.
Сейчас компания готовит третий аппарат – его запуск запланирован на 2026 год.


















